1. 概述
JPS (Jump Point Search),又名跳点搜索算法,是由澳大利亚两位教授于 2011年提出的基于栅格的寻路算法。是对A*算法的一个改进。JSP优化了A/搜索后继节点的操作。A\的处理是把周边能搜索到的格子,加进OpenList,然后在OpenList中弹出最小值。JPS先用一种更高效的方法来搜索需要加进OpenList的点,然后在OpenList中弹出最小值。JPS完整地保留了A*的框架。
只针对于路径的对称性,在A*算法中,介绍了一些简单的优化方法,例如,通过人为地加入某些规则使原本对称的节点计算出的f(n)有微小的偏差,使A*有一定的倾向性。而 JPS 的本质也是打破平衡性,它是一个更系统的方法。
2. 算法详解
2.1 数据结构
寻路过程中需要保存有效点的集合,分为可探索点集合openList,已探索点集合closeList。同A*算法,g(n)为起点经过其他点到当前点的代价和,h(n)为到目标点的代价,f(n)为当前点的与起点终点间价值的和,即f(n)=g(n) + h(n)。
2.2 强迫邻居
JPS算法主要考虑当前节点需要考虑的下一个节点是否应该被考虑。例如下图所示:
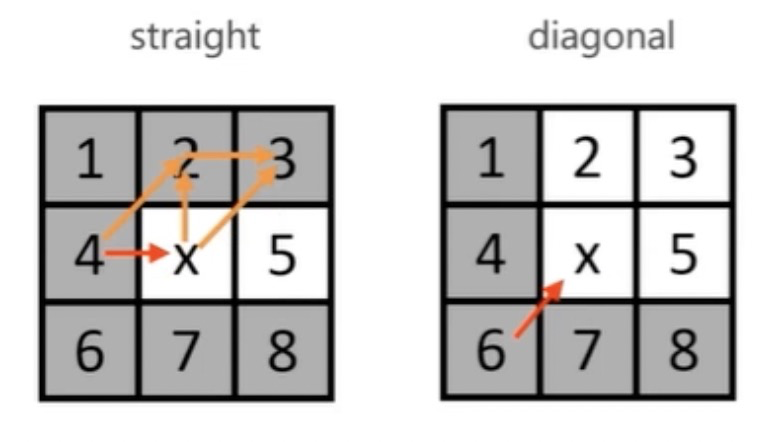
假设x节点为当前节点,考虑x节点的8邻域节点且终点目标在x节点的右侧。那么,x节点要考虑的节点仅包含5号节点,其余节点不需要再被扩展。规则为:如果x的下一个节点能够从x的父节点扩展得到,那么x节点就不需要扩展该节点。例如,节点3,可以从x的父节点4,通过路径4 -> 2 -> 3到达,与路径4 -> x -> 5代价一样,因此,节点3不需要被考虑扩展。同理,节点1、2、3、4、6、7和8都不惜要再被扩展。
同理,对于斜对角线情况,对于当前节点x,其父节点为6,那么对于节点2, 5和3,需要被考虑进行扩展,因为坐着几个节点从x的父节点6到达的成本高于从x到达的成本。其余结点。例如1, 4, 7, 8就不需要再被扩展。
接下来,我们在考虑包含障碍物的空间。如下图所示:
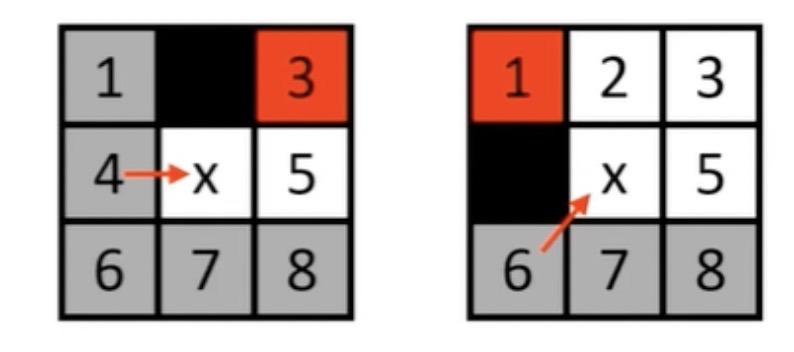
在上述图中,黑色为障碍物,节点x为当前节点,节点4为节点x的父节点,此时,除了节点5需要被考虑扩展以外,节点3也需要被考虑。原因在于节点3不能够通过节点4以低成本的方式绕过x到达。同理,对于右侧的图例,节点1也需要被扩展考虑。
2.3 跳点
在路径上改变移动方向的点就是跳跃点。当前点x是跳跃点满足以下三个条件之一:
- 节点 x 是起点/终点
- 节点 x 至少有一个强迫邻居
- 如果父节点在斜方向(意味着这是斜向搜索),节点x的水平或垂直方向上有满足条件a,b的点
不是跳跃点的节点都可以在扩展时不被考虑。如下图所示:
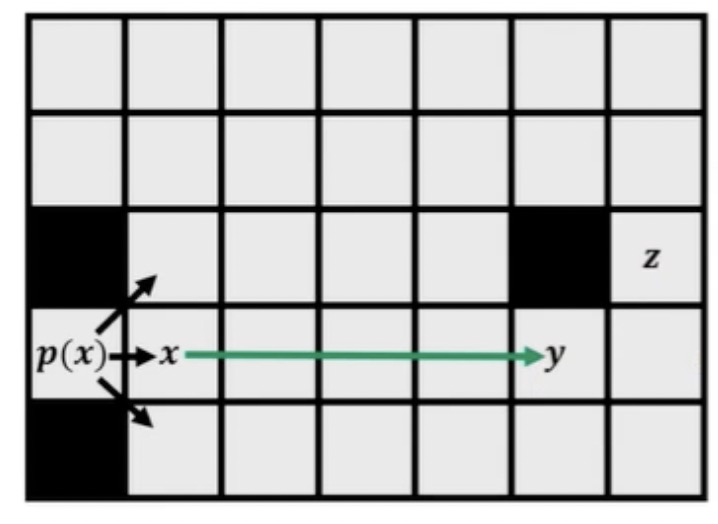
对于节点X和节点y,都是跳跃点,那么节点x和节点y之间的节点就不需要被扩展。
对于对角线情况,如下图所示:
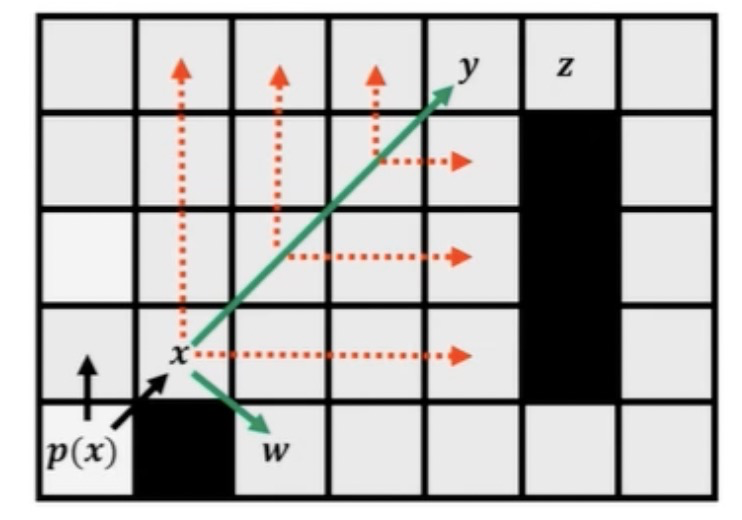
对于节点x和节点y,二者都是跳跃点。但是,在进行斜对角线跳跃前,都需要先进行竖直和水平方向的跳跃检测。从上图中可以看出,节点x和节点y之间的节点进行水平和竖直方向跳跃都失败了,没有找到跳跃点。直到运行到节点y。
2.4 算法原理
- 第一步,open list取一个权值最低的节点,然后开始搜索
- 先进行直线搜索(4/8个方向,跳跃搜索),然后再斜向搜索(4个方向,只搜索一步)。如果期间某个方向搜索到跳点或者碰到障碍(或边界),则当前方向完成搜索,若有搜到跳点就添加进open list
- 若斜方向没完成搜索,则斜方向前进一步
- 若所有方向已完成搜索,则认为当前节点搜索完毕,将当前节点移除于open list,加入close list
- 重复取open list权值最低节点搜索,直到open list为空或者找到终点
下面结合实际情况进行讲解。如下图所示:
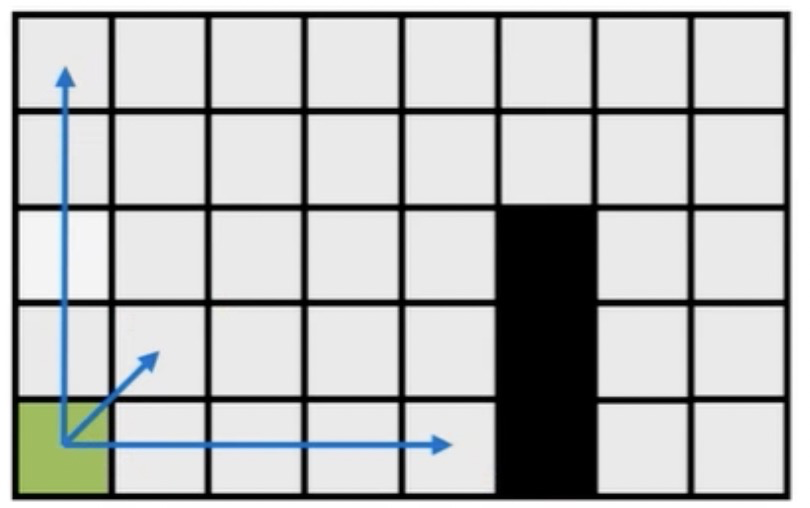
图中,绿色节点为当前节点,黑色节点为障碍物。首先,对于绿色节点,进行水平和竖直方向搜索,均没有找到跳点;那么进行斜向搜索,向前行进一步,如下图所示:
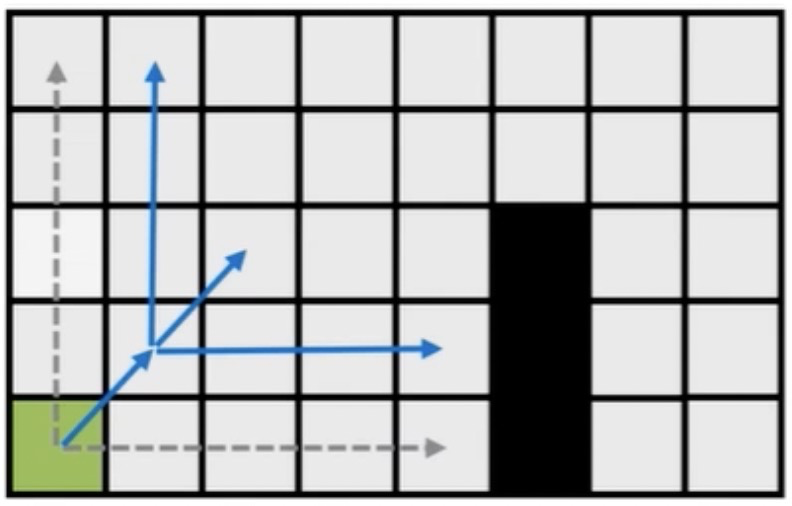
此时,当前节点的情况类似于绿色节点,依然在水平和竖直方向没有找到跳点,那么沿着对角线方向移动,如下图所示:
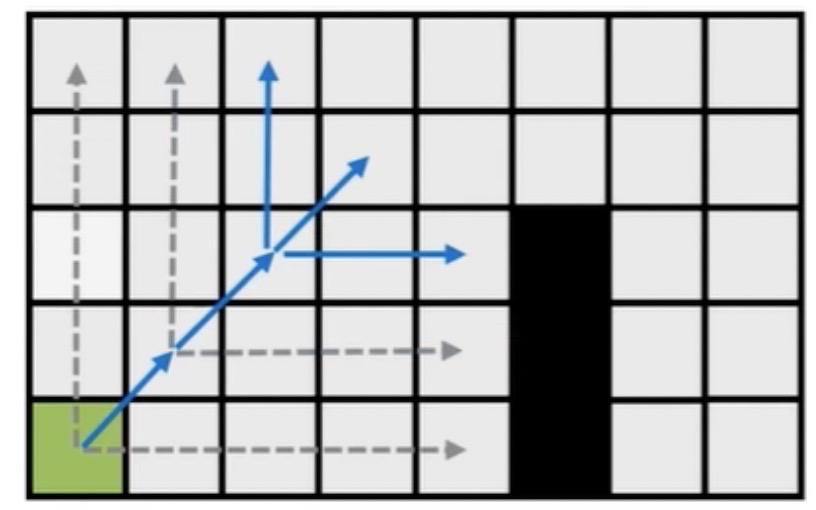
继续运行,当移动到下一个结点时,此时,水平方向发现一个跳跃点,如下图所示:
此时,蓝色节点为关键节点,因为它能够找到一个跳跃点。此时,将蓝色结点放入open list中。斜方向结束,绿色节点的搜索过程也就此结束,被移除于open list,放入close list。
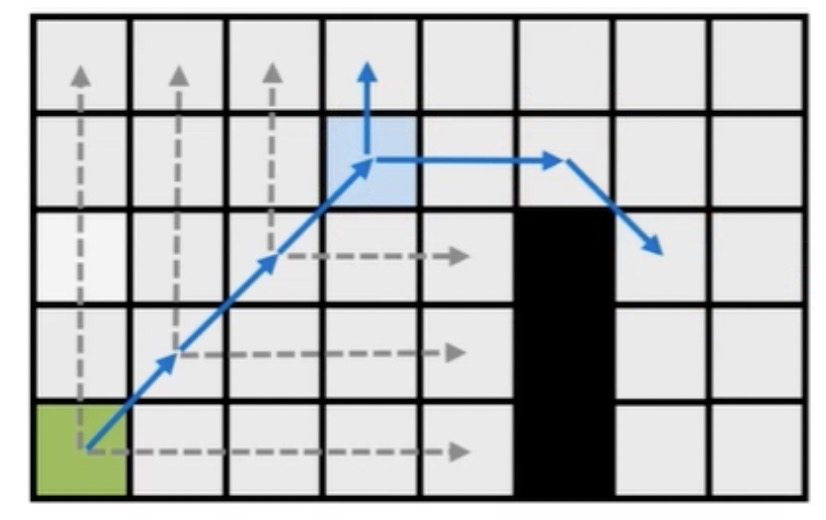
对open list下一个权值最低的节点,即蓝色节点,开启搜索。如下图所示:
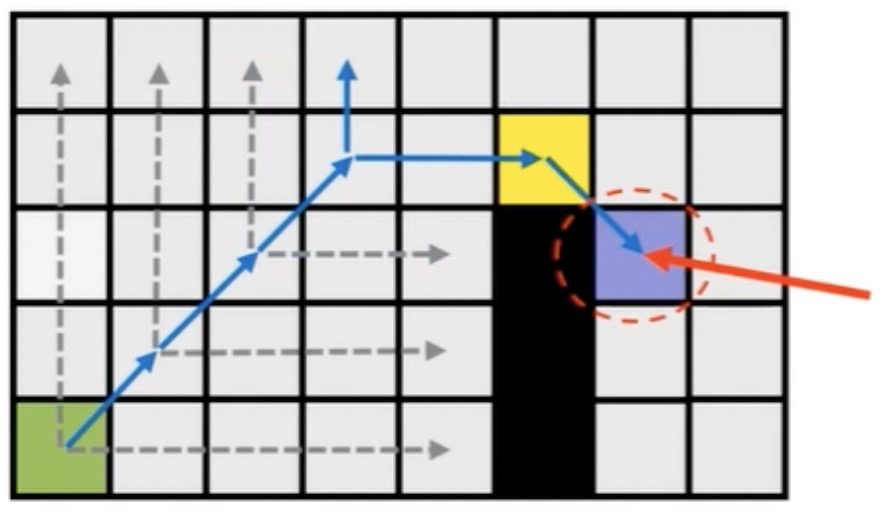
在直线方向上发现了黄色节点为跳点(依据是紫色节点为强迫邻居),类似地,放入open list。由于斜方向还没结束,继续前进一步。最后一次直线搜索和斜向搜索都碰到了边界,因此蓝色节点搜索完成,移除于open list,放入close list中。一次进行,直到到达终点为止。
3. 代码实现
参考:https://github.com/sahibdhanjal/Path-Planning-Simulator