1. 概述
空间索引在多维数据处理中已被广泛应用,常见空间索引一般是自顶向下逐级划分空间的各种空间索引结构,比较有代表性的包括 BSP树、 KD树、 KDB树、 R树、 R+树、 CELL树、四叉树和八叉树等索引结构,而在这些结构中KD树和八叉树在3D点云数据组织中应用较为广泛。KD-Tree简称k维树,是一种空间划分的数据结构,本质上是一种二叉树,常被用于高维空间中的搜索,比如范围搜索和最近邻搜索。KD-Tree用来组织表示K维空间中点集合,是一种带有其他约束条件的二分查找树。如果特征的维度是D,样本的数量是N,那么一般来讲kd树算法的复杂度是O(DlogN),相比于穷算的O(DN)省去了非常多的计算量。
KD-Tree求解的问题如下所示:
给定一堆已有的样本数据,和一个被询问的数据点,如何找到离五角星最近的n个点?
- 基本解法
- 遍历,按照一定距离选取最近的n个点
- 计算复杂度为O(DN)
- 高级解法
- KD-Tree,时间复杂度为O(DlogN)
- …
2. 算法详解
KD-Tree数据结构主要分为两个步骤:KD-Tree的构建和查询。
2.1 构建阶段
构建就是按照某种顺序将无序化的点云进行有序化排列,方便进行快捷高效的检索。
一些术语定义如下:
- 分裂点(split_point)
- 分裂方式(split_method)
- 左儿子(left_son)
- 右儿子(right_son)
数据结构如下所示:
1 | struct kdtree{ |
建树规则如下:
- 针对空间的“维”的
- 节点的状态中的:分裂方式(split_method)
- 建树依据
- 主要思想:先计算当前区间[L, R]中(这里的区间是点的序号区间,而不是我们实际上的坐标区间),每个点的坐标的每一维度上的方差,取方差最大的那一维,设为d,作为分裂方式(split_method ),把区间中的点按照在d上的大小,从小到大排序,取中间的点sorted_mid作为当前节点记录的分裂点,然后,再以[L, sorted_mid-1]为左子树建树 , 以[sorted_mid+1, R]为右子树建树,迭代进行上述步骤
- 初始化分割轴
- 取方差最大的轴为初始分割轴,例如X轴
- 确定当前节点
- 选取中位数为当前点
- 划分双支数据
- 在X轴维度上,比较和中位数的大小,进行划分左支和右支
- 更新分割轴
- 下一个维度为X轴
- 迭代进行上述步骤,直到全部分支构建完毕
- 给定如下数据
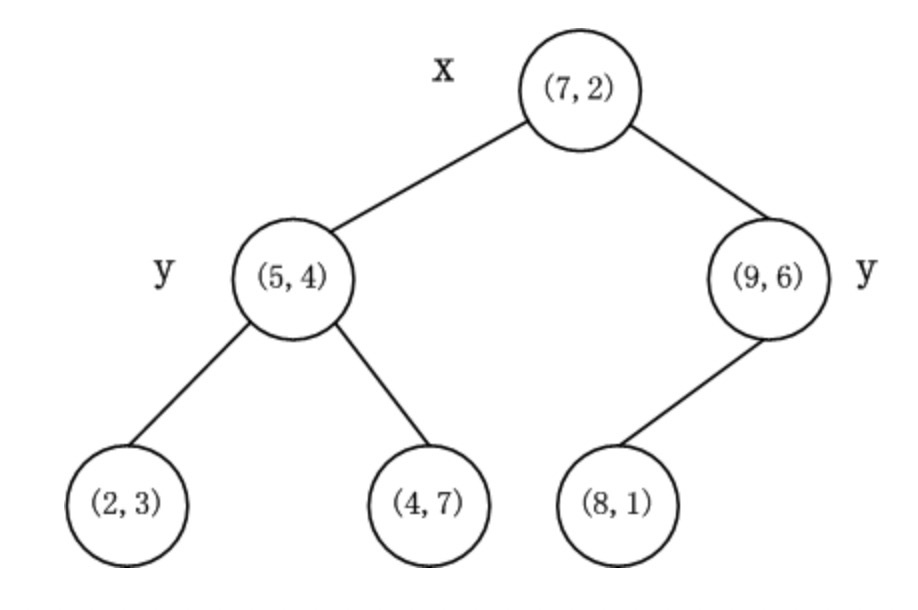
- (2, 3), (5, 4), (9, 6), (4, 7), (8, 1), (7, 2)
- 数据维度只有2维,所以可以简单地给x,y两个方向轴编号为0,1,即split={0,1}
- 以X轴为切分轴,基于X轴对数据进行排序,选取中间数据(7, 2)作为根节点
- 对于左侧数据,以Y轴为切分轴,对数据进行排序,选取中间数据(5, 4)作为左树的子节点
- 再对于左侧数据,迭代进行上一步,直到所有左侧数据均被划分完成
- 对于右侧数据,以X轴为切分轴,选取中间数据(9, 6)作为根节点的左支
- 对于右侧数据,迭代进行上一步,直到所有数据均被划分完成
上述数据的KD-Tree划分结果如下图所示:
即:
1 | { |
2.2 查询
给定一个构建于一个样本集的kd树,下面的算法可以寻找距离某个点p最近的k个样本。
查询的示例参考:https://www.joinquant.com/view/community/detail/c2c41c79657cebf8cd871b44ce4f5d97
步骤:
- 第一步:假设搜索的节点为p,一个有k个空位的列表,用于保存已搜寻到的最近点
- 第二步:根据p的坐标值和每个节点的切分进行向下搜索,例如按照切分方向(向X轴或者Y轴)进行搜索,如果p的坐标小于切分节点坐标,则向左搜索,反之,向右搜索
- 第三步:当达到一个底部节点时,将其标记为访问过
- 如果L里不足k个点,则将当前节点的特征坐标加入L
- 如果L不为空并且当前节点的特征与p的距离小于L里最长的距离,则用当前特征替换掉L中离p最远的点
- 第四步:如果当前节点不是整棵树最顶端节点下述步骤;反之,输出L,算法完成
- 向上爬一个节点
- 如果当前(向上爬之后的)节点未曾被访问过,将其标记为被访问过,然后执行下述步骤
- 如果此时L里不足k个点,则将节点特征加入L
- 如果L中已满k个点,且当前节点与p的距离小于L里最长的距离,则用节点特征替换掉L中离最远的点
- 计算p和当前节点切分线的距离
- 如果该距离大于等于L中距离p最远的距离并且L中已有k个点,则在切分线另一边不会有更近的点,执行第四步
- 如果该距离小于L中最远的距离或者L中不足k个点,则切分线另一边可能有更近的点,因此在当前节点的另一个枝从第二步开始执行
- 如果当前(向上爬之后的)节点未曾被访问过,将其标记为被访问过,然后执行下述步骤
- 向上爬一个节点
实际例子,参考:https://www.joinquant.com/view/community/detail/c2c41c79657cebf8cd871b44ce4f5d97。
3. 代码实现
1 | import numpy as np |
参考:https://github.com/guoswang/K-D-Tree和https://github.com/stefankoegl/kdtree
4. 总结和讨论
Kd树在维度较小时(比如20、30),算法的查找效率很高,然而当数据维度增大(例如:K≥100),查找效率会随着维度的增加而迅速下降。假设数据集的维数为D,一般来说要求数据的规模N满足N>>2的D次方,才能达到高效的搜索。