1. 概述
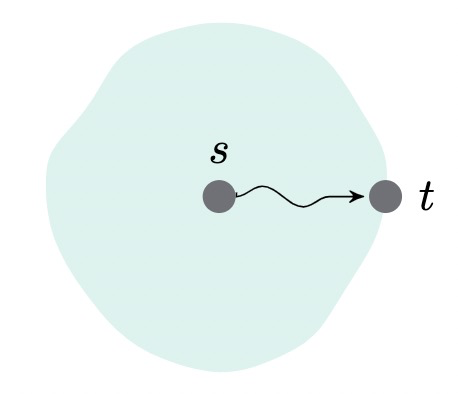
Dijkstra算法是一种单向的最短路径算法,其搜索范围如下图所示。
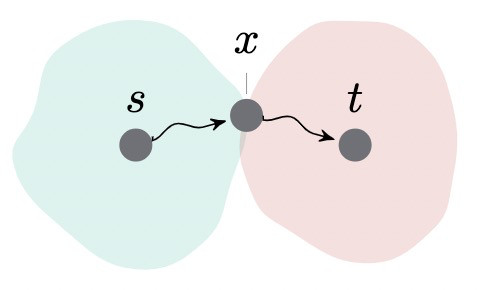
有研究者就提出了一种优化方法,即双向Dijkstra算法。其主要思想就是从起点和终点同时开始搜索,这样应该能够提升算法效率。事实证明,在大部分情况下,双向Dijkstra算法还是要优于单向的Dijkstra算法,其搜索范围如下图所示。
2. 算法详解
- 主要思想
- 分别从路径搜索的起点s和路径搜索的终点t同时执行前向的Dijkstra算法和后向的Dijkstra算法
- 当前向Dijkstra算法和后向Dijkstra算法相遇时,搜索结束。假设二者相遇时的节点为u,起点s到u节点的Dijkstra路径为D(s, u),终点t到u节点的Dijkstra路径为D(t, u),则起点s到终点t的最短路径为: D(s, u) + D(u, t)
- 算法流程
- 从heap中弹出节点
- 更新当前的候选最优路径cost
- 从当前节点广度搜索展开,更新相邻节点的权重,加入heap中
- 最短路径搜索时我们会用到两个容器,一个堆(Heap):维护着已经reach到的候选节点集合;一个Map:维护已经从heap中弹出的节点集合
- PSet和PRelaxed分别表示正向搜索的Map和Heap,NSet和NRelaxed分别表示反向搜索的Map和Heap
- 终止条件:当PSet和NSet初次相遇节点时,获得了第一条候选最优路径时,继续进行双向搜索,但这时停止向heap放入新的节点,仅用弹出当前的PRelaxed和NRelaxed的集合,最优meet节点肯定在红色背景的节点集合中。